from ucimlrepo import fetch_ucirepo
import matplotlib.pyplot as plt
import seaborn as sns
sns.set_theme()
sns.set_style("ticks")
sns.color_palette("dark")
plt.rc("axes.spines", top=False, right=False)
plt.rc("figure", figsize= (12,8))
import pandas as pd
import numpy as npDimensionless Features
Dimensional Analysis
When dealing with machine learning problems for physical systems the quantities we use as features and targets have dimensionality.
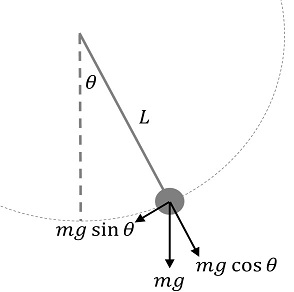
For example consider a simple pendulum of length l \([L]\), mass m \([M]\), gravitational (acceleration) constant g \([L T^{-2}]\), where we want to learn the frequency f \([T^{-1}]\).
We could feed these features as-is to a machine learning model that might do very well on lab generated data, but would it be able to generalize to let’s say a pendulum the size of a carnival ride or a pendulum on the moon?
In order to help the model we could try to incorporate some physics knowledge. The basic idea of dimensional analysis is that for any equation the dimensions must match on the left- and right hand sides.
By ansatz:
\(f = \phi(l, m, g) = k l^{\alpha} m^{\beta} g^{\gamma}\)
We then apply these exponents to the dimensions themselves:
\(T^{-1} = k L^{\alpha} M^{\beta} (L T^{-2})^{\gamma} = k L^{\alpha + \gamma} M^{\beta} T^{-2\gamma}\)
\(\left\{ \begin{aligned} L&: 0 = \alpha + \gamma \\ M&: 0 = \beta \\ T&: -1 = -2 \gamma \end{aligned} \right.\)
This immediately yields \(\gamma = \frac{1}{2}, \beta = 0, \alpha = -\frac{1}{2}.\)
We have found the equation for the frequency of the simple pendulum without any force balancing, vector algebra, trigonometry etc.
\(f = k \sqrt{\frac{g}{l}}\)
This means that the frequency can be predicted by \(\sqrt{\frac{g}{l}}\) alone in the linear regime and we would only have to learn the constant \(k\). This holds for all ranges of lengths and gravities.
The fact that \(\phi\) is a function of \(\sqrt{\frac{g}{l}}\) also holds in the nonlinear case, to show this we need the Buckingham \(\pi\) theorem.
In short this tells us that any physical system described as a function of variables \(q_0,...q_i\) can also be described as a function of a dimensionless group of variables \(\Pi_0,...\Pi_j\) where \(j ≤ i\).
For the pendulum we only need \(\Pi_0 = f\sqrt{\frac{l}{g}}.\) and the starting angle \(\Pi_1 = \theta_0\), its behaviour is described by some functional \(F(\Pi_0,\theta_0) = 0\).
Machine Learning
Let’s explore the benefits of using dimensionless features in Machine Learning.
Intuitively dimensionless features could help models by allowing them to interpolate instead of extrapolate, and reducing the feature space so they can focus on learning the core relationships.
In the case of the pendulum, this means we could find frequencies on the moon based on earth data as long as the ratio \(g/l\) stays somewhat within the training data range, and the model wouldn’t have to fit the nonlinear relationship \(\sqrt{\frac{\bullet}{\bullet}}\).
An anecdote: I have successfully used dimensional analysis in practice. A company I worked for needed a model for an inline quality control system. The requirement was that it must be a linear regression model due to it running on PLCs and implemented manually by technicians. A few people before me attempted to solve it using polynomial regression, but there were still problematic nonlinearities, a lot of variance, and the coefficients couldn’t generalize well across product types. I created a dimensionless group out of the given features, observed that these actually followed a nice linear relationship where one model could describe the full range of different product types. In the end the model was only feasible & accurate thanks to the dimensionless features having this uncanny ability to generalize. This was a few years ago but it was implemented in production and estimated to have saved millions of $ since.
Airfoil Example
Let’s try try it out on a dataset from NASA on airfoils in a wind tunnel experiment.
airfoil_self_noise = fetch_ucirepo(id=291)
data = airfoil_self_noise.data
X = data.features
y = data.targets["scaled-sound-pressure"]
airfoil_self_noise.metadata{'uci_id': 291,
'name': 'Airfoil Self-Noise',
'repository_url': 'https://archive.ics.uci.edu/dataset/291/airfoil+self+noise',
'data_url': 'https://archive.ics.uci.edu/static/public/291/data.csv',
'abstract': 'NASA data set, obtained from a series of aerodynamic and acoustic tests of two and three-dimensional airfoil blade sections conducted in an anechoic wind tunnel.',
'area': 'Physics and Chemistry',
'tasks': ['Regression'],
'characteristics': ['Multivariate'],
'num_instances': 1503,
'num_features': 5,
'feature_types': ['Real'],
'demographics': [],
'target_col': ['scaled-sound-pressure'],
'index_col': None,
'has_missing_values': 'no',
'missing_values_symbol': None,
'year_of_dataset_creation': 1989,
'last_updated': 'Fri Mar 29 2024',
'dataset_doi': '10.24432/C5VW2C',
'creators': ['Thomas Brooks', 'D. Pope', 'Michael Marcolini'],
'intro_paper': None,
'additional_info': {'summary': 'The NASA data set comprises different size NACA 0012 airfoils at various wind tunnel speeds and angles of attack. The span of the airfoil and the observer position were the same in all of the experiments. ',
'purpose': None,
'funded_by': None,
'instances_represent': None,
'recommended_data_splits': None,
'sensitive_data': None,
'preprocessing_description': None,
'variable_info': 'This problem has the following inputs:\r\n1. Frequency, in Hertzs. \r\n2. Angle of attack, in degrees. \r\n3. Chord length, in meters.\r\n4. Free-stream velocity, in meters per second. \r\n5. Suction side displacement thickness, in meters. \r\n\r\nThe only output is:\r\n6. Scaled sound pressure level, in decibels. \r\n',
'citation': None}}airfoil_self_noise.variables| name | role | type | demographic | description | units | missing_values | |
|---|---|---|---|---|---|---|---|
| 0 | frequency | Feature | Integer | None | None | Hz | no |
| 1 | attack-angle | Feature | Binary | None | None | deg | no |
| 2 | chord-length | Feature | Continuous | None | None | m | no |
| 3 | free-stream-velocity | Feature | Continuous | None | None | m/s | no |
| 4 | suction-side-displacement-thickness | Feature | Continuous | None | None | m | no |
| 5 | scaled-sound-pressure | Target | Continuous | None | None | dB | no |
X.join(y).hist(bins=30);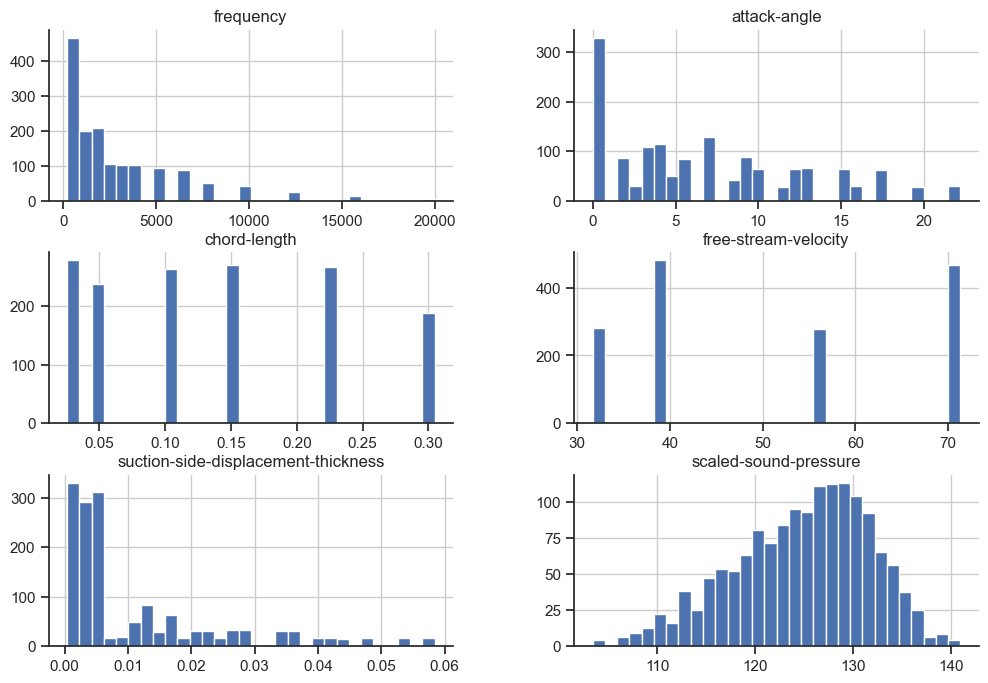
pd.plotting.scatter_matrix(X.join(y));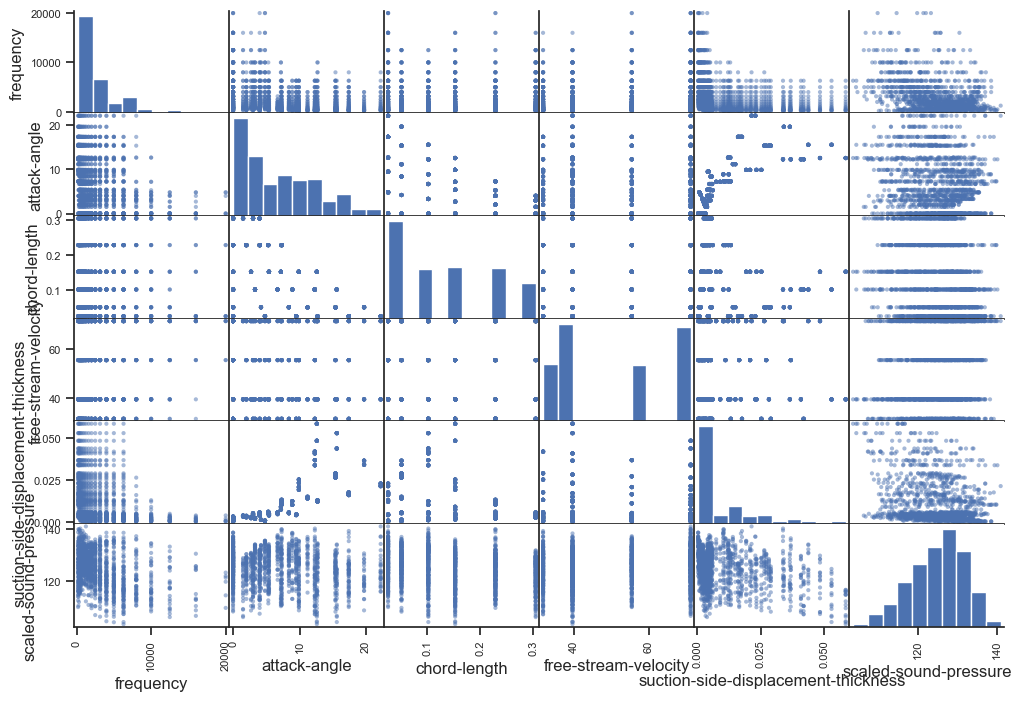
sns.scatterplot(x=X["frequency"], y=y);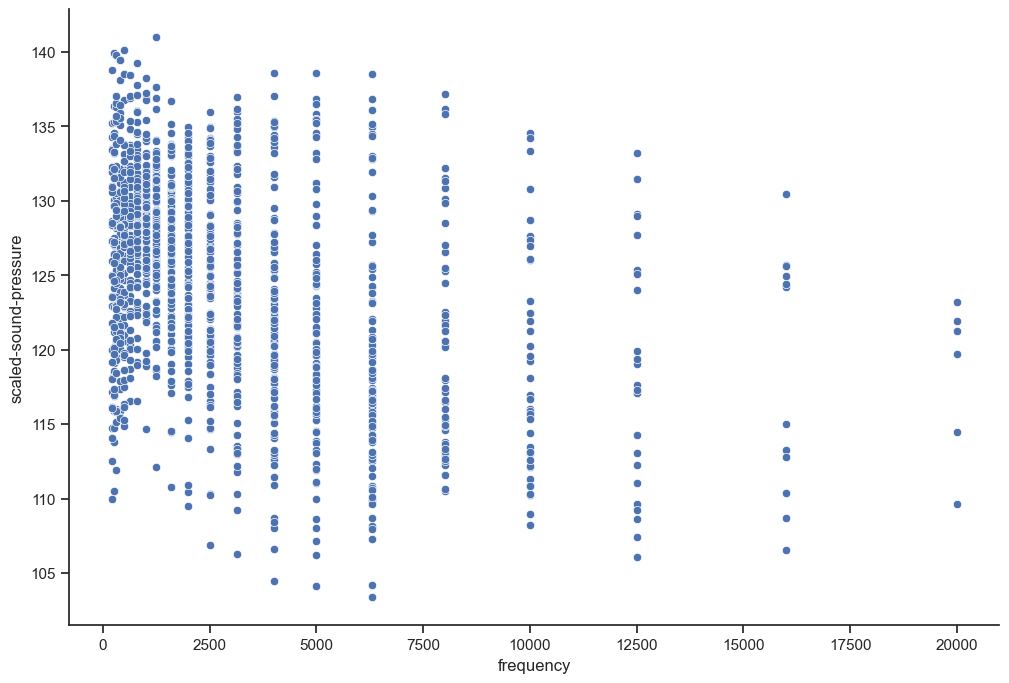
To showcase the extrapolation capabilities of dimensionless features, let’s reserve the largest frequencies as a test set.
test_inds = X["frequency"] > 2000
X_test = X.loc[test_inds,:]
y_test = y.loc[test_inds]
X_train = X.loc[~test_inds,:]
y_train = y.loc[~test_inds]
print(f"Train size: {y_train.shape[0]}, test_size: {y_test.shape[0]}")Train size: 872, test_size: 631sns.histplot(y_train, bins=30, stat="probability")
sns.histplot(y_test, bins=30, stat="probability", alpha= 0.3, color="orange")
plt.legend(["y_train", "y_test"])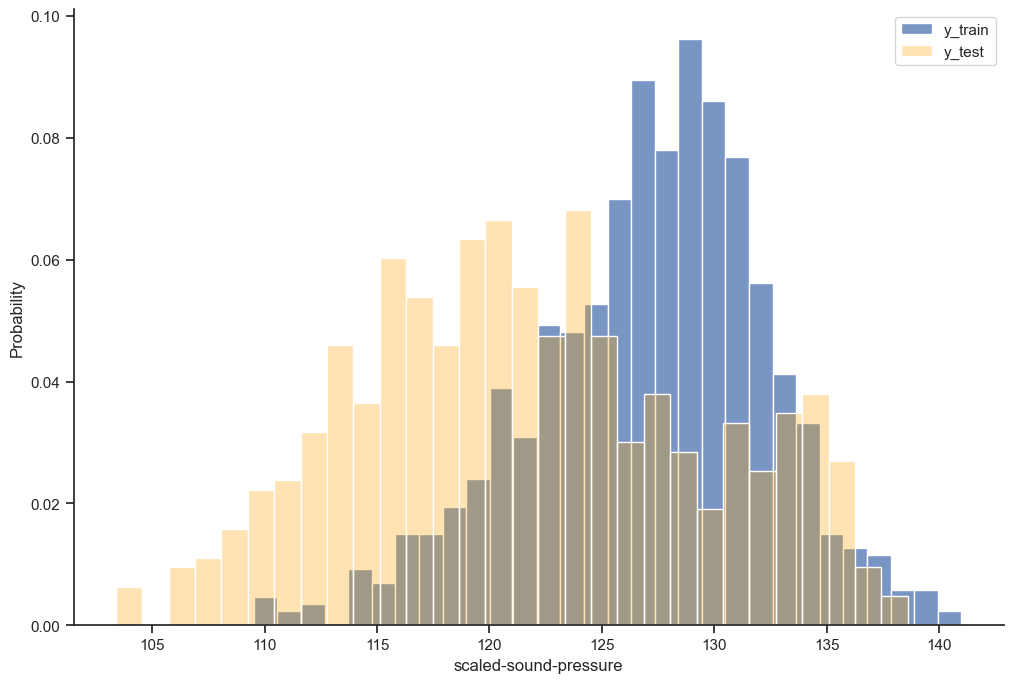
Feature Engineering
What are we working with here? There are 5 features and 1 target.
| Name | Dimension | variable |
|---|---|---|
| frequency | \(T^{-1}\) | \(f\) |
| attack-angle | \(1\) | \(\theta\) |
| chord-length | \(L\) | \(l\) |
| free-stream-velocity | \(L T^{-1}\) | \(v\) |
| suction-side-displacement-thickness | \(L\) | \(d\) |
| scaled-sound-pressure | \(1\) | \(y\) |
We are blessed with two quantities already being dimensionless, especially fortunate for the target so we can isolate it. Scaled sound pressure measured in dB is dimensionless since it is a ratio of pressures, the raw sound pressure would have had dimensionality \([M L^{-1} T^{-2}]\) which would involve some auxilliary variable that contains mass, for example the density of air.
We can repeat the method from before to construct a dimensionless group out of \(f, l, v, d\) by assuming the following relation:
\[y = f^{\alpha} l^{\beta} v^{\gamma} d^{\delta}\]
Plug in the dimensions
\[L^0T^0 = 1 = T^{-\alpha} L^{\beta} (L T^{-1})^{\gamma} L^{\delta}\]
Match the exponents
\[L^0T^0 = L^{\beta + \gamma+ \delta} T^{-\alpha-\gamma}\]
Linear system of equations
\[\left\{ \begin{aligned} T&: 0 = -\alpha - \gamma \\ L&: 0 = \beta + \gamma + \delta \end{aligned} \right. \quad \Rightarrow \quad 0 = -\alpha + \beta + \delta \]
This is indeterminate with 2 degrees of freedom. By the Buckingham \(\pi\) theorem the degrees of freedom is equal to the number of original variables minus the number of base dimensions (\(L\),\(T\) etc) and equal to the number of dimensionless variables needed, in this case \(4-2=2\). Let’s choose \(\alpha = 1\).
This means
\[ \left\{ \begin{aligned} \alpha &= 1 \\ \beta &= 1 - \delta \\ \gamma &= -1 \\ \end{aligned} \right. \]
Dimensionless groups are not unique, different choices are possible here, but we need a base that spans the exponents. We can define two dimensionless variables corresponding to \(\delta = 0, \delta=1\).
\[\Pi_0 : \left\{ \begin{aligned} \alpha &= 1 \\ \beta &= 1 \\ \gamma &= -1 \\ \delta &= 0 \end{aligned} \right. \]
\[ \Pi_1 : \left\{ \begin{aligned} \alpha &= 1 \\ \beta &= 0 \\ \gamma &= -1 \\ \delta &= 1 \end{aligned} \right. \]
Note that \(\Pi_0\), \(\Pi_1\) are symmetrical of the form \(\frac{fL}{v}\), this is called the Strouhal number and is used in fluid dynamics to describe vortex shedding and related phenomena. A physicist would maybe choose a dimensionless group consisting of the Strouhal number using the airfoil thickness \(d\) and some other number that involves the length \(l\), for example the Reynolds number. But this is a machine learning article so we’ll pretend we didn’t see that.
def nondim_trans(X, delta_basis=(0,1)):
d_0, d_1 = delta_basis
pi_0 = X["frequency"]**1 * X["chord-length"]**(1-d_0) * X["free-stream-velocity"]**-1 * X["suction-side-displacement-thickness"]**d_0
pi_1 = X["frequency"]**1 * X["chord-length"]**(1-d_1) * X["free-stream-velocity"]**-1 * X["suction-side-displacement-thickness"]**d_1
return pd.DataFrame(data=np.vstack([pi_0, pi_1]).T, columns=["pi_0", "pi_1"])X_train_trans = nondim_trans(X_train)
X_test_trans = nondim_trans(X_test)\(\Pi\) varies by several orders of magnitude, so let’s work with the logarithm from now on.
X_train_trans = X_train_trans.apply(np.log)
X_train_trans["attack-angle"] = X_train["attack-angle"].values
X_test_trans = X_test_trans.apply(np.log)
X_test_trans["attack-angle"] = X_test["attack-angle"].valuespd.plotting.scatter_matrix(X_train_trans.join(y_train));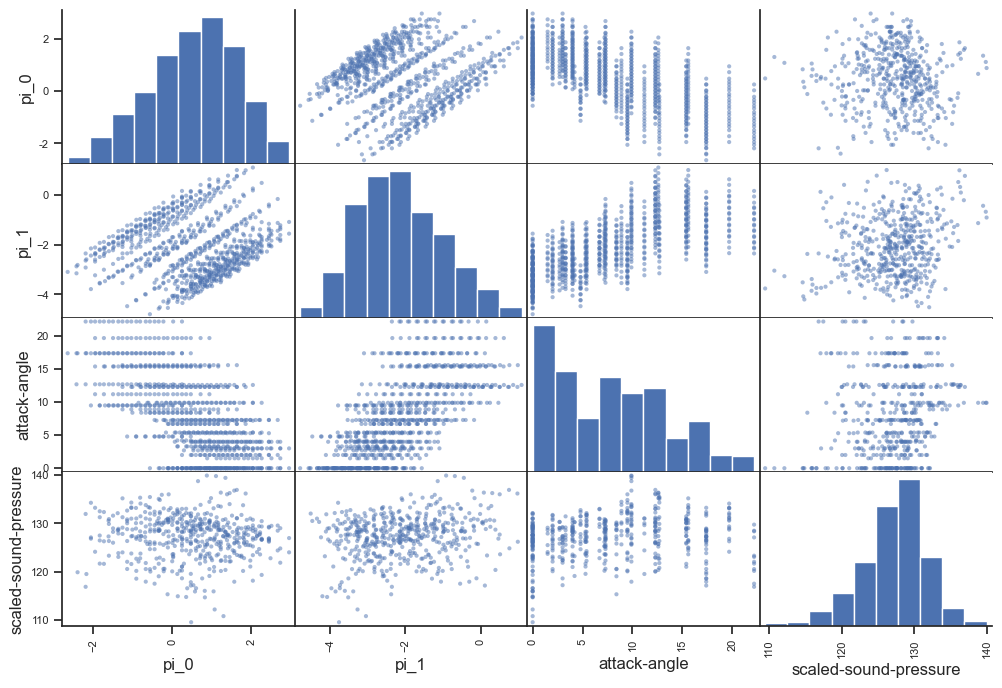
from sklearn.ensemble import RandomForestRegressor
from sklearn.metrics import root_mean_squared_errormodel_trans = RandomForestRegressor(max_depth=4, n_estimators=100)
model_orig = RandomForestRegressor(max_depth=4, n_estimators=100)model_trans.fit(X_train_trans, y_train);
model_orig.fit(X_train, y_train);yh_trans = model_trans.predict(X_test_trans)
yh_orig = model_orig.predict(X_test)
yh_trans_tr = model_trans.predict(X_train_trans)
yh_orig_tr = model_orig.predict(X_train)rmse_trans_test=root_mean_squared_error(yh_trans, y_test)
rmse_orig_test=root_mean_squared_error(yh_orig, y_test)
rmse_trans_train=root_mean_squared_error(yh_trans_tr, y_train)
rmse_orig_train=root_mean_squared_error(yh_orig_tr, y_train)
print(f"RMSE: train nondim {rmse_trans_train:.2f}, train orig {rmse_orig_train:.2f}, test nondim {rmse_trans_test:.2f}, test orig {rmse_orig_test:.2f}")RMSE: train nondim 3.52, train orig 3.65, test nondim 4.75, test orig 8.53fig, axes = plt.subplots(1, 2, sharex= True, sharey=True)
sns.scatterplot(x=y_test, y=yh_trans, hue = X_test["frequency"], ax=axes[0], palette = "coolwarm");
sns.scatterplot(x=y_test, y=yh_orig, hue = X_test["frequency"], ax=axes[1], palette = "coolwarm");
axes[0].set_title('Dimensionless');
axes[1].set_title('Original');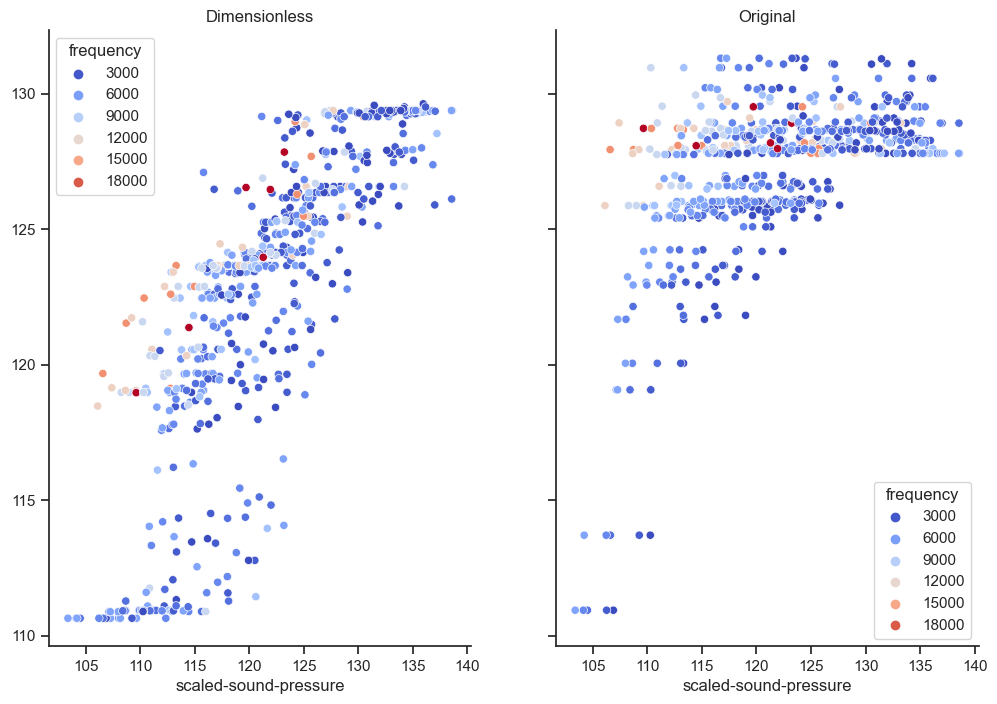
In this case the dimensionless version seems to have learned a bit more about what happens at higher frequencies than the model based on the original features. It is also better calibrated out of sample, the original version overshoots. When testing it became clear that the original version wins in many cases when the test set isn’t as extreme. The best method may be to add the dimensionless features to the originals. I hope this illustrates the point of using dimensional analysis.